I had been stalled most of the week because I wanted to work on the electronics inside the droid, but I wanted to use an electronics panel, rather than attach the electronics to the frame, as I did on droid #1.
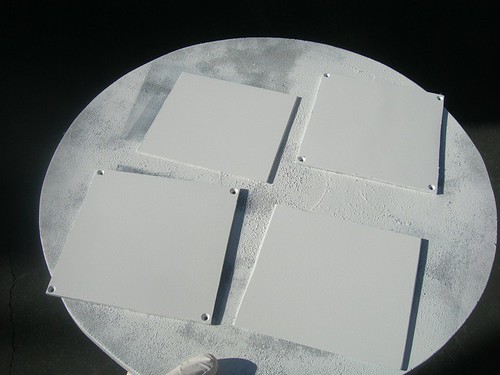
The electronics panel will be made from 1/4" plywood. Mike Senna did a nice job of this, as seen in
this photoset. I went over to Mike's to use his table saw to cut the panel, and to ask questions about the wiring.
The first step is to figure out where the electronics panel should go. In Mike's example, it went just in front of the center leg. I neglected to bring the center leg, but fortunately
this blog entry showed a picture of where the leg and vertical bar meet. Luckily, I did bring the vertical bar, so we used that as a guide.
We dropped a piece of plywood flush against the vertical rail, and used another piece of MDF to mark where the back of the electronics panel should sit.

I rested the panel on top of the frame, aligned the back side with the first mark that was just made, and marked where the front of the panel hit the top of the frame.

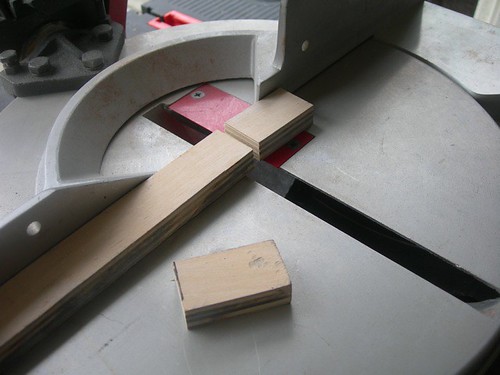
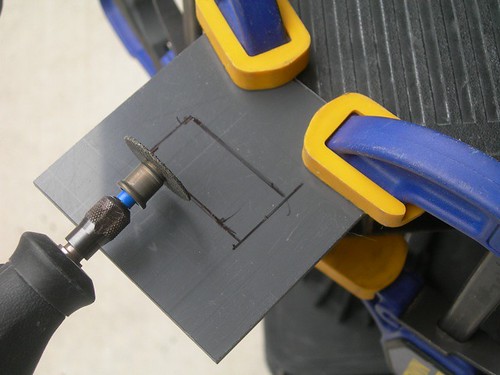
I used hacksaw to start carving out the notches.


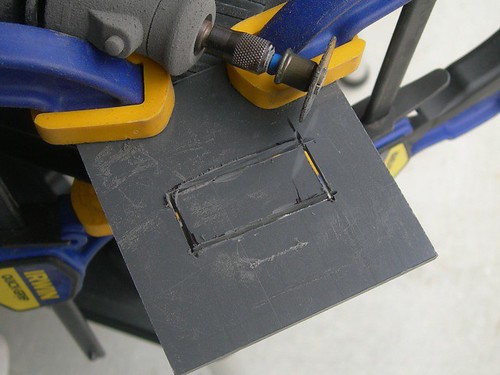
I used a hammer and screwdriver as a poor man's chisel to knock out the notch once the ends had been cut.


A file helped clean things up.

I marked the width of the cut on the frame onto the panel, in preparation for the first cut.

I used Mike's table saw to cut the panel to the proper width.

I slid the panel into the frame, and marked the proper height.


I put Mike to work briefly as the photographer, and cut the panel to the proper height.

The fit in the frame looks pretty good.

When I got home, I temporarily installed the center leg, and found that while the panel does fit, it's a tight squeeze. I might file the slots in the frame so that the bottom of the panel slopes forward a bit more, or I may slightly trim a portion of the top of the center leg that lives high inside the body. We'll see.
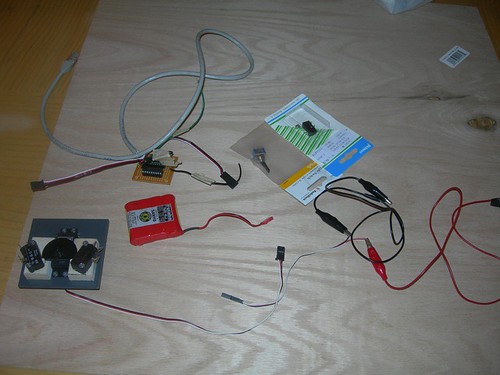
Soon I'll start installing the electronics on the panel, on the way to having sound and dome rotation working.