Next, I calibrated the speed controller with my transmitter. Setting DIP swithes 5 and 6 on the 2x12RC allows the controller to be trained on the minimum, neutral, and maximum values for the joystick settings, and those setting can be saved.
Only channel 4 is needed for dome rotation. The model name "2x12RC" indicates it is a 2-channel, 12 amp Remote Control speed controller. I've found that if I leave the second channel disconnected from the receiver, the dome tends to drift and the controller supplies a very small amount of voltage to the dome motor (under one volt). So little voltage is supplied, that the motor doesn't actually turn; instead it simulates a stall condition, causing the speed controller, wiring and motor to get pretty hot.
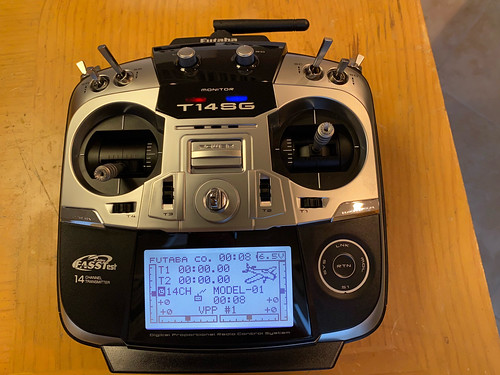
I found that if I attach the second channel from the speed controller to an unused channel on the receiver, AND if I disable the corresponding channel on the transmitter, then this problem goes away completely. In this case, I attached the second channel from the speed controller to channel 3 on the receiver, and then disabled channel 3 on the Futaba 14SG transmitter.
 In the case of droid #2, I'm using the Futaba 10CAG transmitter, which doesn't allow channel 3 to be disabled, so I had to use channel 5 on the receiver and disable that channel on the transmitter.
In the case of droid #2, I'm using the Futaba 10CAG transmitter, which doesn't allow channel 3 to be disabled, so I had to use channel 5 on the receiver and disable that channel on the transmitter.



 Sorry to leave you hanging, 2x12RC. Not for long.
Sorry to leave you hanging, 2x12RC. Not for long.








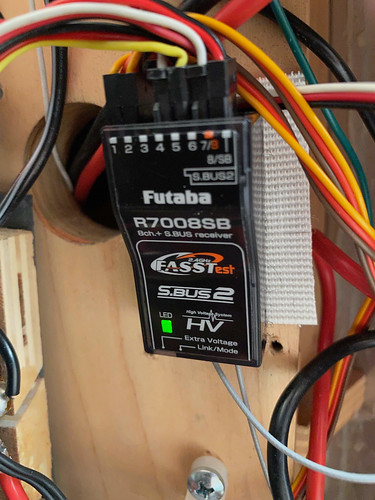
 And, in it goes. Its footprint is somewhat smaller that its predecessor's. (I wrote "predecessor" because I was too lazy to retype R7008SB. Except I just typed that, and more. Plus, predecessor has more characters than R7008SB.)
And, in it goes. Its footprint is somewhat smaller that its predecessor's. (I wrote "predecessor" because I was too lazy to retype R7008SB. Except I just typed that, and more. Plus, predecessor has more characters than R7008SB.)
 I still need to attach Mike Senna's Switch 15 box that I use to trigger sounds and other functions on droid #1. This gets Velcroed to the bottom of the transmitter. The battery cover is on the bottom of the transmitter as well, but that's ok. I will simply slide the Switch 15 box to remove the battery cover.
I still need to attach Mike Senna's Switch 15 box that I use to trigger sounds and other functions on droid #1. This gets Velcroed to the bottom of the transmitter. The battery cover is on the bottom of the transmitter as well, but that's ok. I will simply slide the Switch 15 box to remove the battery cover.
 Just a bit more work to do.
Just a bit more work to do.