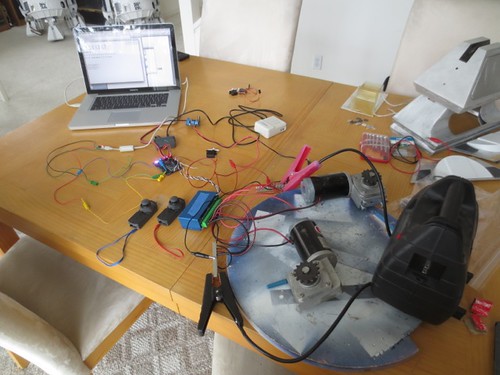
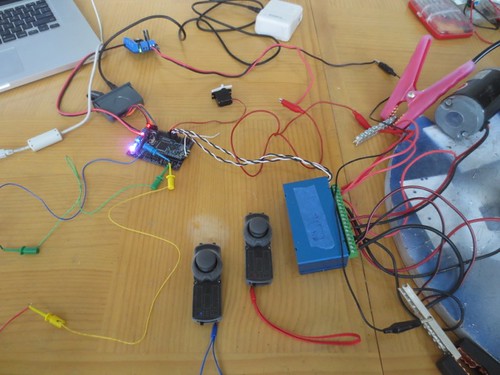
I finally attached my Vantec RDFR23 speed controller to the Stealth receiver board. I found that I needed to adjust the neutral and trim settings for servos 1 (steering) and 2 (throttle) in the negative direction. Once I did that the motors idled when the stick is in the neutral position, as well as when the failsafes kick in. I'm also experimenting with the acceleration curves on the Vantec RDFR23 to take some of the "touchiness" out of the joysticks. The Stealth Controller also has the ability to scale the speed of the servo movement, so I'll keep experimenting until I find the responsiveness I like.
Amazingly, I haven't shorted anything out yet, but I'm probably pressing my luck.

No comments:
Post a Comment