In my naivete a few months ago, I didn't realize that the coils inside the motors were coated with a thin insulator. I mistook it for copper, since the insulator is a transparent copper-color. Thus, when I converted the motors, as I soldered I failed to strip off the insulation, leading to very poor solder joints. So we went through all the motors and Mike scraped off the insulator and resoldered the motors that needed work.

Later, we worked on getting my CFSound III volume controls working via the remote control and Vantec Keycoder. I have given up on directly connecting outputs from the Keycoder to the 3-pin connector on the CFSound III board. It seems as though the voltage floats a bit when the volume switches are not actuated, causing the volume to drift up and down by itself when the lines are connected this way.
Instead, I went to Orvac Electronics yesterday and picked up a couple of NTE R57−5D.25−12D Relays. The idea is to use the relays as an electronic switch, connecting the middle (ground) pin of the 3-pin header to either of the outer pins. Two relays are required, one for volume-up, one for volume-down.
Mike's the EE, I'm just the software guy, so I entrusted him to read the schematic and solder.
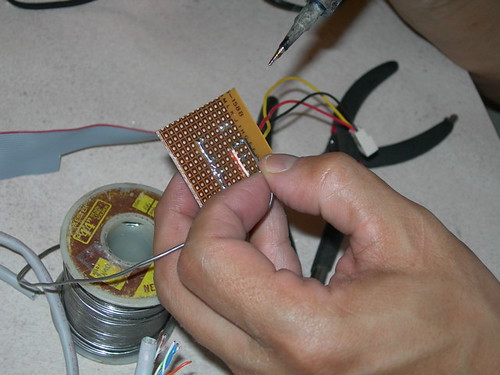
The connections are as follows:
Pin 1 is connected to one of the outer pins on the CFSound III 3-pin volume header. Pin 2 is connected to +12 volts. Pin 6 is connected to the Keycoder input (switch 15 for volume-down, switch 16 for volume-up in my case). Pins 7 and 8 are connected to the center (ground) pin on the CFSound III 3-pin volume header. All other pins are not connected, and are just soldered down to the breadboard to keep the part in place.
This works! Now my volume can be controlled remotely. Yea!
Finally, we worked on R2-KT. By the time I arrived, Mike had already bolted the ankles onto the legs nice and tight, with beefy bolts.
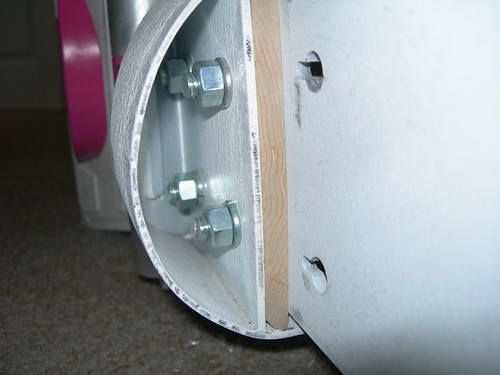
The shoulders also get new, sturdy bolts. The two bolts in the shoulder-to-body hub are just being tried on for size, they actually go through the legs and hub, and on into the shoulder.

The front 2" ball caster in the center foot is getting gunked-up and gross. It barely spins. :(

Time to put R2-KT back together again (as Mike chats with Rick Thames on the phone)...

... and crank down on those bolts.

They may not have domes, but my R2 is proud to be next to KT. (I think the domes were socializing in the next room.)


No comments:
Post a Comment