The first step is to drill a somewhat shallow hole into the end of the arm. I lined the vise with a towel and clamped the top arm down.

As you shall soon see, I botched this hole for the top arm, I didn't drill the hole in quite the right spot.
I did manage to hit the mark for the bottom arm, so I cut a segment of rod to size and did a test fit.

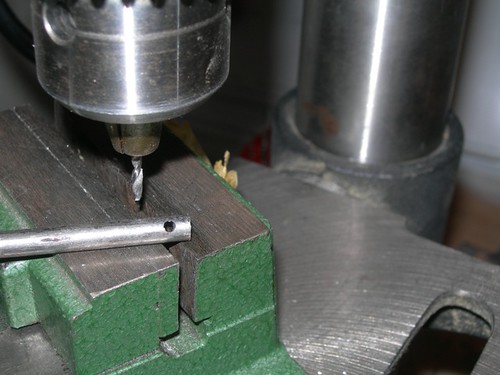
A hole needs to be drilled near the end of the rod, to allow a paper clip to slide through. One day in the future, the paper clip will be attached to a servo motor (see here for more info). After breaking a 1/16" drill bit while trying to drill through the end of the rod, I switched to a 5/64" drill bit, and drilled a hole near the end of the rod segment. The hole is kind of wide, but hopefully not too wide. I guess I can either wrap something around the paper clip when the time comes, or maybe use a toothpick to apply a tiny bit of JB Weld in there. We shall see.
As I said, I botched the hole for the top utility arm, so I filled the hole with JB Weld. I'll let it dry overnight, sand it smooth and try drilling again.


The rod in the bottom arm is good to go, so I JB Welded it in, and it too will dry overnight.


2 comments:
Hey Victor. Looks like good work. You're more methodical and patient than me.
Question: on your first droid, it looks like you used Futaba s3151 servos for the utility arms. Are you happy with those? Would you go with something different now that you've used them a bunch? Thanks.
Matt
Hi Matt,
I'm happy with the S3151 servos, but I have to admit, I don't know any better. They are the only servos I've ever used, and so far they've suited my purposes. I'm using them for the arms and as part of my dome controller.
BTW, in case you didn't see my comment on your blog a while ago, congratulations on all the progress you've made, it looks like you're just about there!
-Victor
Post a Comment