First, I had to fit each motor to its foot shell, to determine where to clip wires and solder connectors.

Next, I soldered the connectors to the NPC wires.

Each solder joint was covered in shrink tubing.

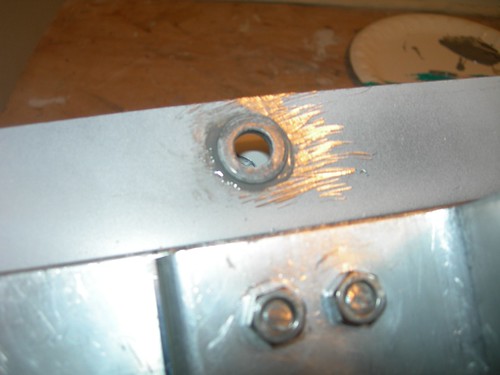
As I went to put the new drivetrain on the droid, I managed to knock out one of bushings where the ankle bolt hole goes on the left drivetrain, thus derailing my chances of running the droid tonight. :(

I scuffed up the area, applied a generous amount of JB Weld to the bushing, and tapped it back in with the hammer.
Meanwhile, back on the droid, I decided to test the right drivetrain.

I found that it spun backward, which wasn't much of a surprise. There was a 50/50 chance that the NPC motors were going to connect the opposite way from the Trico motors. I swapped the positive and negative wires on the terminals on the Vantec RDFR23 speed controller, and all was well.

I tested the left motor to see if it would spin backward, and it did, so I also swapped its wires on the speed controller and it now turns properly.
Tomorrow I hope to fit the left drivetrain on the droid, and then start doing some minor repairs to things that I knocked off during this operation. Hopefully everything will be done by the end of the week and R2 will be back in action.

No comments:
Post a Comment