

Next, I worked on cutting the pivot rods for the utility arms. I sized up how long they need to be by using the blue arms as a guide.

I cut the rod to size.

And repeated for the other arm.

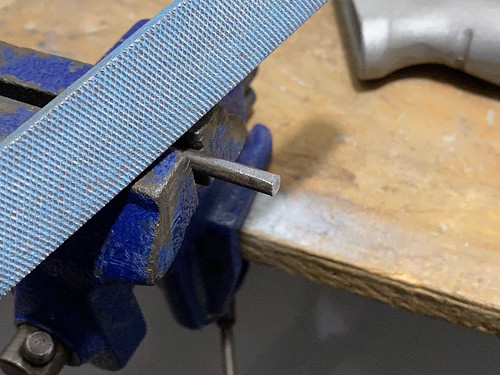
I filed flat spots on the pivot rods, for drilling a small hole.
And drilled holes in the pivot rods. These holes are for if/when I attach a servo motor to the frame to open and close the arms, like I have in droid #1. The servo horn would use a paper clip that goes through the holes to pivot the arms open and closed.


Soon I plan to drill the ends of the arms to accommodate the pivot rods.

No comments:
Post a Comment